Трехфазный асинхронный двигатель
Асинхронной машиной является
электромеханический преобразователь, в котором возникновение момента на валу
ротора возможно лишь при различных скоростях вращения магнитного поля и ротора.
Асинхронные машины наибольшее
распространение получили как двигатели. Это основной двигатель, применяемый в
промышленности, сельском хозяйстве и в быту. Только асинхронных двигателей
единых серий мощностью от 0,6 до 400 кВт в нашей стране ежегодно выпускается
около 10 млн. Асинхронных микродвигателей мощностью от 0,6 кВт изготовляется
несколько десятков миллионов в год.
Электротехническая
промышленность выпускает асинхронные двигатели в большом диапазоне мощностей.
Предельная мощность асинхронных двигателей – несколько десятков мегаватт. В
индикаторных системах применяются асинхронные двигатели мощностью от долей
ватта до сотен ватт. Частота вращения двигателей общего назначения – от 3000 до
500 об/мин.
В генераторном режиме
асинхронные машины применяются редко. Для создания поля в зазоре асинхронной
машины необходима реактивная мощность, которая забирается из сети или от других
источников реактивной мощности. Асинхронные двигатели не могут работать с cosц=1.
Это существенный недостаток асинхронных машин, ограничивающий их применение в
генераторном режиме.
При электромеханическом
преобразовании энергии в асинхронных машинах, как и в других машинах,
происходит преобразование энергии а тепло. Электрические потери в роторе
асинхронной машины пропорциональны скольжению. Чтобы большая часть
электрической энергии преобразовывалась в механическую, асинхронные машины
используются в электроприводах, где допустимо небольшое скольжение (s= =
1–4%). При глубоком скольжении (s=10–50%) асинхронные машины используются редко, так
как в это случае большая часть мощности, забираемой из сети, преобразуется в
тепло, что приводит к низкому КПД и увеличению габаритов асинхронной машины
из-за трудностей, связанных с отводом тепла от активных частей машины.
Наличие в роторе потерь,
пропорционально зависящих от скольжения, – одна из особенностей
асинхронных машин, обусловливающих их отличие от других типов электрических
машин.
Если обмотки ротора
представляют собой замкнутые контуры, то при скольжении s=1
вся мощность, поступающая на ротор, преобразуется в тепло. При скольжении s=0
мощность на ротор не поступает. При скольжениях, отличных от 0 и 1,
электромагнитная мощность преобразуется в двигательном режиме в механическую
мощность и в тепло, а в генераторном режиме – в электрическую и в тепло.
В конструктивном исполнении
асинхронные двигатели – наиболее простые, они получили наибольшее
распространение.
Расчёт характеристик трехфазных асинхронных двигателей
Рассчитать рабочие характеристики
и построить зависимости частоты вращения n, вращающего
момента М2, тока обмотки статора I1, потребляемой мощности P1 и коэффициента мощности cos ц1
в функции полезной мощности Р2.
Определить значения
критического скольжения Sк,
максимального Мmax и пускового Мп моментов двигателя и их
относительных значений М*max и M*п.
Рассчитать и построить
механическую характеристику двигателя М(S) для разных
величин скольжения S. Скольжение рекомендуется представлять в процентах
(долях единицы значений: S= S%/100).
Величину С1 принять равной С1=1+ X1/Xм.
Расчет следует выполнить для
значений скольжения S= (0,0025; 0,005; 0,01; 0,02; 0,025; 0,03; 0,2; 0,3).
Для каждой величины
скольжения нужно определить:
– активные Iхха, реактивные Iххр, действующие Iххд, величины тока холостого хода, тока статора I1а, I1р, I1д, тока ротора I2а, I2р, I2д;
– мощности: потребляемую
P1,
преобразованную Pпр и
полезную P2;
– коэффициент мощности cos ц1;
к.п.д. з;
– угловую скорость n и
момент нагрузки М2.
Исходные данные:
Номинальная мощность на валу
Р2Н, кВт 30
Номинальное линейное
напряжение U1Н, В 660
Синхронная угловая скорость n1, об/мин 750
Коэффициент полезного
действия зН 90,5
Коэффициент мощности cos ц1
0,81
Активное сопротивление цепи
намагничивания r*М 0,18
Индуктивное сопротивление
цепи намагничивания х*М 2,15
Активное сопротивление
обмотки статора r*1 0,030
Приведенное активное
сопротивление обмотки ротора r2* 0,022
Индуктивное сопротивление
обмотки статора х*1 0,073
Приведенное индуктивное
сопротивление обмотки ротора х2* 0,17
Механические потери Рмех,
кВт 0,37
Для расчёта используем Г-образную
схему замещения асинхронного двигателя с вынесенным намагничивающим контуром.
При этом определим поправочный коэффициент для заданной схемы:
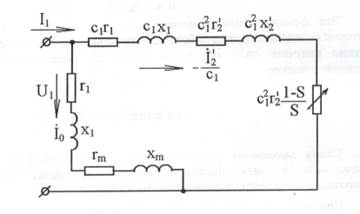
Рисунок 1. Схема замещения
асинхронной машины в Г-образной форме
Для схемы соединения обмоток
«звездой» определяем номинальные фазные напряжения и фазные (которые являются
также и линейными) токи.
Фазное напряжение:
Приведённая мощность:


Добавочные потери определяем
по формуле:

Фазный ток обмоток статора:

Заданные относительные
сопротивления переводим в омические.
Коэффициент перевода
электрических параметров из относительных единиц в именованные:
Найдём найденное
сопротивление в именованных единицах. Определим активное сопротивление цепи
намагничивания потери в стали:

Индуктивное сопротивление
взаимоиндукции приведённой первичной и вторичной цепи:

Активное сопротивление
обмотки статора в именованных единицах:

Индуктивное сопротивление
обмотки статора в именованных единицах:

Активное приведённое
сопротивление обмотки ротора в именованных единицах:

Определим индуктивное
приведённое сопротивление обмотки ротора:

Определяем токи холостого
хода ротора и статора.
Полное активное сопротивление
рабочего контура:

Определим полное индуктивное
сопротивление рабочего контура:

Таким образом полное
эквивалентное сопротивление контура намагничивания определяем по формуле:

Определим 
Определим 
Определим действующее
значение тока холостого хода статора:
Определим активную
составляющую тока холостого хода:

Определим реактивную
составляющую тока холостого хода:

Для заданной схемы определим
поправочный коэффициент:
Для различных значений S
рассчитываем:
Токи статора I1a, I1p, I1
Токи ротора I2a, I2p, I2
Коэффициент мощности cosj
Потребляемую мощность Р1
Полезную мощность Р2
Преобразованную мощность Рпр
Коэффициент полезного
действия h
Угловую скорость n
Момент нагрузки на валу
двигателя М2
Определим приведённое
активное сопротивление обмотки статора по формуле:
Определим эквивалентное
активное сопротивление рабочего контура:
Приведённое индуктивное
сопротивление рабочего контура:
Полное приведённое
сопротивление рабочего контура:
Определим коэффициент
мощности при S=0,0025
Действующее значение тока
ротора:

Активная составляющая тока
ротора

Определим реактивную
составляющую тока ротора:
Определим активную
составляющую тока статора:

Реактивная составляющая тока
статора:

Определим действующее
значение тока статора:

Определяем добавочное
приведённое активное сопротивление в цепи ротора:
Определяем полезную мощность
на валу двигателя
где: 
Определяем угловую скорость
магнитного поля статора:

Определяем угловую скорость
магнитного поля машины:

Определяем момент нагрузки на
валу двигателя:

Определяем потребляемую
мощность машины:
Определим приведённое
индуктивное сопротивление рабочего контура:

Выполняем расчеты при S=
0,0025; 0,005; 0,01; 0,02; 0,025; 0,03; 0,2; 0,3, результаты сводим в таблицу
3П (Расчет выполнен на компьютере с использованием программы Excel)
Таблица 1
|
№ п/п
|
Значение
|
Значение S
|
|
|
|
0,0025
|
0,005
|
0,01
|
0,02
|
0,025
|
0,03
|
0,2
|
0,3
|
|
1
|
R’2
|
100,1348
|
50,0674
|
25,0337
|
12,5168
|
10,01348
|
8,3446
|
1,251685
|
0,834456
|
|
2
|
R»2
|
100,4649
|
50,3975
|
25,3639
|
12,8470
|
10,34364
|
8,6747
|
1,581843
|
1,164615
|
|
3
|
Rпр
|
99,8844
|
49,8170
|
24,7834
|
12,2665
|
9,76314
|
8,0942
|
1,001348
|
0,584119
|
|
4
|
Z»2
|
100,5022
|
50,4719
|
25,5112
|
13,1355
|
10,69983
|
9,0965
|
3,161932
|
2,975217
|
|
5
|
cos«2
|
0,9996
|
0,9985
|
0,9942
|
0,9780
|
0,96671
|
0,9536
|
0,500277
|
0,391439
|
|
6
|
I»2
|
3,7915
|
7,5498
|
14,9366
|
29,0093
|
35,61282
|
41,8898
|
120,5121
|
128,0751
|
|
7
|
I»2a
|
3,7901
|
7,5387
|
14,8504
|
28,3722
|
34,42728
|
39,9475
|
60,28948
|
50,13354
|
|
8
|
I»2r
|
0,1033
|
0,4095
|
1,6030
|
6,0464
|
9,112391
|
12,6077
|
104,3473
|
117,8552
|
|
9
|
I1a
|
5,2979
|
9,0465
|
16,3582
|
29,8800
|
35,9352
|
41,4554
|
61,7974
|
51,6414
|
|
10
|
I1r
|
16,0652
|
16,3715
|
17,5649
|
22,0083
|
25,0743
|
28,5697
|
120,3092
|
133,8172
|
|
11
|
I1
|
16,9162
|
18,7047
|
24,0024
|
37,1104
|
43,81845
|
50,3465
|
135,2524
|
143,4359
|
|
12
|
cos 1
|
0,3132
|
0,4837
|
0,6815
|
0,8052
|
0,820092
|
0,8234
|
0,456904
|
0,360031
|
|
13
|
Рпр
|
4307,59
|
8518,58
|
16587,72
|
30968,22
|
37146,98
|
42610,26
|
43628,23
|
28744,33
|
|
14
|
Рдоб
|
7,15
|
8,75
|
14,40
|
34,43
|
48,00141
|
63,37
|
457,3303
|
514,3466
|
|
15
|
P2
|
3930,44
|
8139,84
|
16203,32
|
30563,79
|
36728,98
|
42176,89
|
42800,9
|
27859,99
|
|
16
|
W1
|
104,667
|
|
17
|
W
|
104,405
|
104,143
|
103,620
|
102,573
|
102,050
|
101,5267
|
83,73333
|
73,26667
|
|
18
|
М2
|
37,65
|
78,16
|
156,37
|
297,97
|
359,91
|
415,4267
|
511,1573
|
380,2546
|
|
19
|
Р1
|
6056,36
|
10341,58
|
18699,98
|
34157,48
|
41079,40
|
47389,88
|
70643,87
|
59034,06
|
|
20
|
h
|
0,6490
|
0,7871
|
0,8665
|
0,8948
|
0,8941
|
0,889998
|
0,605869
|
0,471931
|
|
21
|
n
|
997,5
|
995
|
990
|
980
|
975
|
970
|
800
|
700
|
По данным таблицы 1 строим
рабочие характеристики асинхронного двигателя, требуемых зависимостей.
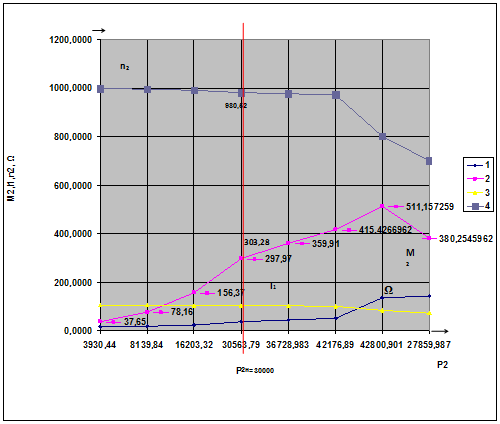
Рисунок 1(а). График
рабочих характеристик асинхронного двигателя
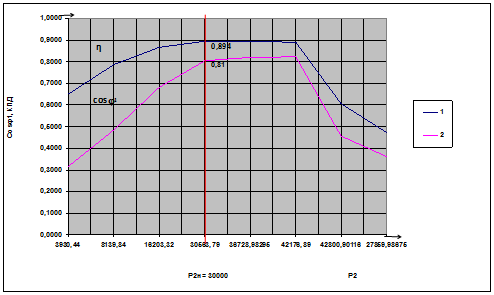
Рисунок 2(б). График
рабочих характеристик асинхронного двигателя
По построенным графикам
рабочих характеристик определяем расчётные номинальные значения М2н,
зн, cosц1н, соответствующие заданному номинальному
значению мощности P2н= 30кВт и
сравниваем их со значением в таблице исходных данных 1.
М2н= 303,28 Нм; зн=89,4;
cosц1н=0,817;
 ;
; 
Погрешность расчета для всех
параметров не превышает 5%.
Определяем критическое
скольжение:

Так как расчет выполняем для
двигателя, то в формуле стоит +.
Определяем максимальный
момент:

Определяем пусковой момент

b =r/(C*r)
Кратности пускового Мп
и максимального Mmax, составляют:
Пользуясь формулой Клосса
определяем электромагнитный момент для заданных значений скольжений S=
(0,1…. 1,0).
Подставив в формулу различные
значения S, проведём вычисления, результаты которых сведём в
таблицу 2.
Таблица 2
|
0
|
0,091
|
0,1
|
0,3
|
0,5
|
0,7
|
1
|
|
0
|
752,56
|
749,64
|
439,32
|
');
// -->
Геометрические параметры. Модуль зацепления
m=(0,01…0,2)aw. (3.9) Ширина колес b= aw. (3.10) Суммарное число зубьев при угле наклона колес с раздвоенной ступенью b=35°: zS=2 awcosb/m, (3.11) Число зубьев шестерни z1=zS/(u+1). (3.12) Число зубьев колес z2= zS-z1, (3.13) Уточненный угол наклона b=arcos(m zS/2aw), (3.14) Делительные диаметры d= ...
Карданная передача
Карданная передача позволяет передавать крутящий момент между валами, расположенными под изменяющимся при движении автобуса углом. Ведущие мосты автомобиля подвешиваются к его раме с помощью упругих элементов подвески и во время движения изменяют своё положение относительно рамы. Коробка передач за ...
Конкурентные позиции
Здесь, в условиях с неблагоприятными и высокозатратными условиями для строительства железнодорожных путей и автомобильных, водный транспорт во многих районах безальтернативен. Значит, конкурентов в навигационный период нет. А у каждого вида транспорта своя специфическая ниша. Дополнительные затраты ...
|