Датчики скорости

В базовую конструкцию стенда был внесен ряд датчиков, которые снимают исходные данные с исполняющих устройств.
При диагностировании автомобилей оснащенных автоматической трансмиссией необходимо постоянно контролировать скорость движения автомобиля на стенде. Также при диагностировании АТС на данном стенде существует проблема неверного определения тяговых качеств из-за наступления момента проскальзывания ведущих колес по поверхности ролика, в момент, когда сила тяги на колесе превосходит силу сцепления шин с поверхностью нагружающего ролика.
Для контроля скорости, движения автомобиля на стенде, и наступления момента проскальзывания ведущих колес на поверхности роликов, были установлены датчики, которые определяют скорость каждого ролика стенда. При сравнивании скорости поддерживающих и нагружных роликов можно судить о моменте наступления проскальзывания.
В качестве датчика был использован индуктивный датчик положения коленчатого вала автомобиля ГАЗ 3110. В основе работы индуктивных датчиков частоты вращения лежит явление электромагнитной индукции. Датчик выполнен в виде катушек с магнитными сердечниками. При прохождении под сердечником метки в виде болта на поверхности бегового барабана магнитный поток датчика изменяется, и в катушке датчика индуцируется электродвижущая сила. Амплитуда импульсов зависит от частоты вращения и зазора между сердечником датчика и поверхности барабана. Конструкция и принцип действия индуктивного датчика изображены на рисунке 2.7.
Датчик генерирует импульсы при прохождении в его магнитном поле метки в виде болта на поверхности бегового барабана. На барабане установлено 8 меток, исходя из этого, период следования импульсов датчика равен 45°.
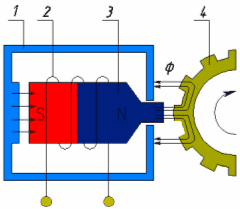
1 – Магнитопровод; 2 – Катушка индуктивности; 3 – Магнитный сердечник;
4 – Ферромагнитный диск; Ф – Магнитный поток; евых – выходной электрический сигнал
Рисунок 2.7 – Принцип действия индуктивного датчика
По рабочему чертежу были изготовлены три кронштейна, и неподвижно закреплены к раме стенда. На кронштейны установлены датчики частоты вращения роликов рисунок 2.8. На поверхности роликов сделаны по 8 отверстий с резьбой, в которые вкручены болты М6. Между сердечником индуктивного датчика и меткой был выставлен зазор в 1 мм.
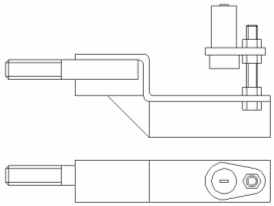
Рисунок 2.8 – Датчик частоты вращения установленный на кронштейне
При вращении роликов стенда на выходе установленных индуктивных датчиков появляется сигнал напряжения синусоидальной формы рисунок 2.9. В зависимости от изменения скорости вращения роликов стенда изменяется частота возникновения импульсов напряжения.
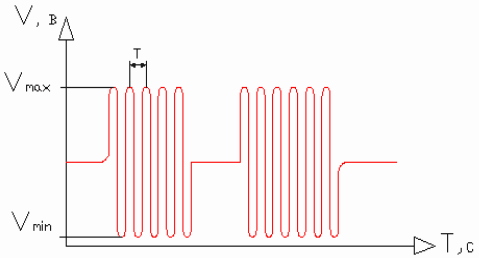
Рисунок 2.9 – Осциллограмма работы индуктивного датчика
Для подключения индуктивных датчиков, установленных на стенде, к аналого-цифровому преобразователю необходимо изменить форму его выходного сигнала, так как аналого-цифровой преобразователь способен воспринимать сигнал только в виде напряжения. Изменение сигнала частоты возникновения импульсов в напряжение возможно сделать при помощи электрической схемы преобразователя работающей на микросхеме LM 2907N.