Производство работ скреперами
Страница 4
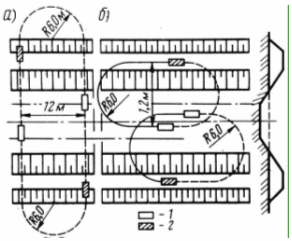
Рис. 4.3 Эллиптическая или кольцевая схема движения скрепера
а – с поперечной разработкой грунта; б – с продольной разработкой грунта; 1 – набор грунта; 2 – разгрузка грунта
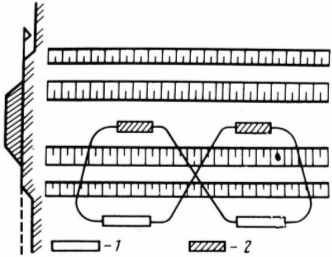
Рис. 4.4 Схема движения скрепера "восьмеркой"
1 – набор грунта; 2 – разгрузка грунта
Если резервы расположены в одной или с обеих сторон дороги, скрепер может выполнять работу зигзагами (рис. 4.5).
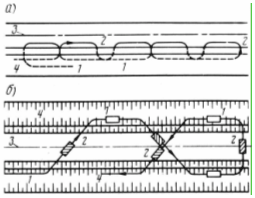
Рис. 4.5. Схема движения скрепера зигзагами
а – при расположении резерва с одной стороны насыпи;
б – при расположении резервов по обе стороны насыпи;
1 – набор грунта; 2 – разгрузка грунта; 3 – ось насыпи; 4 – резерв
По этой схеме скреперы совершают движения по зигзагообразной насыпи, попеременно заходя в резерв для набора грунта и выезжая на возводимую насыпь для разгрузки, а в конце участка делают поворот на 180° и возвращаются в обратном направлении, повторяя цикл работ.
При продольно-челночной схеме движения скрепера (рис. 4.6-а) ось земляного сооружения является границей между двумя ее частями и прилегающими резервами или отвалами. Применение продольных схем разработки грунтов находится в прямой зависимости от дальности транспортирования грунта скреперами. Эта схема движения позволяет сократить количество поворотов скрепера.
При поперечно-челночной схеме движения скрепера (рис 4.6-б) набор грунта производится перпендикулярно оси земляного сооружения как в одну, так и в другую сторону. Эта схема позволяет сократить количество поворотов скрепера и применяется при двусторонних резервах и кавальерах; при этом ширина резерва или выемки должна быть не менее длины пути набора грунта.
Управление скрепером при производстве работ. Работа скрепера с механическим управлением протекает в такой последовательности: при подходе скрепера к месту разработки машинист открывает переднюю заслонку. Для этого левый рычаг управления лебедки поворачивают в правое положение и тем самым включают барабан лебедки, на который наматывается канат заслонки. Установив требуемый зазор между ножом ковша и заслонкой, машинист закрепляет заслонку установкой левого рычага управления лебедки в нейтральное положение. После этого правый рычаг управления лебедки поворачивает в правое положение и тем самым растормаживает правый барабан лебедки, что дает возможность ослабить натяжение канатов, на которых удерживается ковш, в результате чего ковш под действием собственного веса углубляется в грунт. По мере врезания ковша в грунт и перемещения скрепера вперед ковш его стремится глубже уйти в грунт, поэтому машинист, управляющий скрепером, должен поддерживать ковш на определенной высоте, обеспечивая быстрое его наполнение без перегрузки трактора или тягача. Значительная толщина срезаемой стружки (примерно более 30 см) вызывает перегрузку двигателя, снижение его оборотов и остановку.
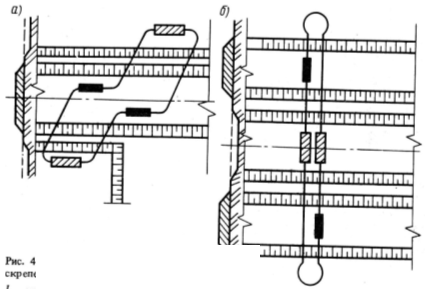
Рис. 4.6. Челночные схемы движения скрепера
1 – набор грунта, 2 – разгрузка грунта
Правильное положение ковша при резании и наборе грунта машинист определяет по работе двигателя. Двигатель должен работать на полную мощность, что определяется по звуку. Требуемое положение ковша машинист фиксирует переводом правого рычага в нейтральное положение. После того как ковш будет близок к заполнению, машинист постепенно выглубляет его и устанавливает в транспортное положение.
Для того чтобы поднять ковш в транспортное положение, правый рычаг управления лебедки машинист отводит в левую сторону, вследствие чего правый ее барабан начинает вращаться, наматывая на себя канат, и поднимает ковш. В это же время левый рычаг управления лебедки машинист отводит в левую сторону, чем достигается растормаживание левого барабана лебедки, при этом передняя заслонка под действием собственного веса опускается вниз. Транспортное положение ковша машинист фиксирует переводом правого рычага управления лебедки в нейтральное положение.
Определение себестоимости
Таблица 8. Калькуляция себестоимости № п/п Статья затрат Затраты, руб. Структура себестоимости (%) Годовой объём На единицу продукции 1 Заработная плата (основная и дополнительная) 3846663,27 6411,11 17 2 Начисления на заработную плату. 1000132,45 1666,89 5 3 Затраты на основные материалы и запасны ...
Статический момент, передаваемый сцеплением
; где - максимальный момент двигателя по ВСХ, ; - коэффициент запаса сцепления для легковых АТС – 1,2…1,75 ...
Технология получения бензина
Бензин – самый важный продукт переработки нефти. Его получают путем переработки нефти, газового конденсата, природного газа, угля, торфа и горючих сланцев, а также синтезом из окиси углерода и водорода. Основным сырьем для производства автомобильных бензинов является нефть. Современное производство ...