Производство работ одноковшовыми экскаваторами
Страница 5
Грейферное оборудование бывает как с гибкой подвеской ковша, так и с жесткой. В целях лучшего наполнения грейферного ковша (при гибкой подвеске) вес его выбирается соответственно группе разрабатываемого грунта (табл. 6.5).
При разработке грейферным ковшом с жесткой веской улучшается наполнение ковша и увеличиваете точность посадки ковша на грунт и выгрузки.
Таблица 6.5
|
Группа грунта |
Вес грейферного ковша, т, при емкости, м3 |
|
0,5 |
0,75 |
1 |
1,5 |
|
I, II |
0,6 – 1 |
0,9 – 1,45 |
1,15 – 1,95 |
1,6 – 2,7 |
|
III, IV и скальный разрыхленный |
1,5 |
2,2 |
2,85 |
4 |
Экскаваторы-планировщики – это одноковшовые гидравлические экскаваторы с телескопическим рабочим оборудованием. Они в последнее время получили широкое распространение вследствие своей большой универсальности.
Телескопическое рабочее оборудование экскаваторов-планировщиков имеет не менее четырех движений: наклон стрелы в вертикальной плоскости, выдвижение стрелы, поворот ковша или всей стрелы относительно ее продольной оси и поворот ковша в вертикальной плоскости.
Возможность движения рабочего органа по прямым, горизонтальным и наклонным траекториям позволяет использовать экскаватор-планировщик на работах по планировке дна котлована, траншей под фундаменты, для планировки откосов насыпей, выемок горизонтальных поверхностей, обратной засыпке пазух фундаментов в труднодоступных местах и траншей с разравниванием, зачистке недоборов грунта в котлованах и траншеях, разработке траншей, небольших котлованов и выемок в стесненных условиях и других земляных работах.
Экскаваторы-планировщики могут быть также использованы на погрузочно-разгрузочных работах, при рыхлении дорожных покрытий или плотных грунтов путем применения соответствующего сменного оборудования.
Схемы производства работ экскаваторами-планировщиками представлены на рис. 6.6.
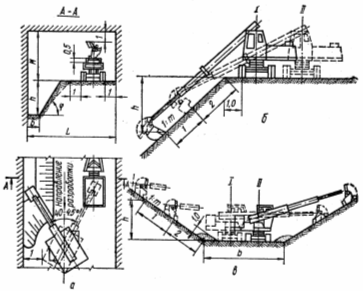
Рис. 6.6. Схемы работ, выполняемых экскаваторами-планировщиками
а – разработка траншей в стесненных местах; б – планировка откосов выемок насыпей с верхней стоянки: I – положение оси экскаватора, перемещающегося в допустимо возможном приближении к откосу; II – положение оси экскаватора, перемещающегося в возможном удалении от откоса; в — планировка откосов выемок и насыпей с нижней стоянки: I — положение оси экскаватора, перемещающегося в возможном удалении от откоса; II — то же, перемещающегося в допустимо возможном приближении к откосу; 1, 2 — зоны планирования.
График оборота пригородных
составов
Режим работы подвижного состава, место и время его отстоя и экипировки, смены бригад, потребное их количество определяются графиком оборота, разработка которого ведется одновременно с составлением графика движения пригородных поездов. Количество составов, необходимое для обслуживания потребных разм ...
Техническая эксплуатация транспортных средств
1. Выбор типа транспортного средства – обеспечить ТС минимальными транспортными расходами. 2. Определить необходимое количество транспортных средств: 2.1 Определяем время, затраченное ТС на один рейс: t = tпр + tдв tдв = 2*Lт / Vср где tпр – время погрузки, разгрузки (по методичке = 7 мин) Vср – ср ...
Источники внутренней информации и характеристика передаваемых ими сведений
Внутренняя информация- возникает в самой системе управления и отражает в различные временные интервалы его финансовое положение. Внутри организации обмены информацией происходят между уровнями руководства (вертикальные коммуникации) и между подразделениями (горизонтальные коммуникации). Межуровневы ...